
Introduction
Recently, when we studied oscillation or SHM —- fundamentals of waves and periodic motions —- Birdy(鸟哥) asked me a question that “seemed” to be so obvious: why the equation of oscillations are derived from the circular motion?
Here are some explanations on the knowledge for the readers who haven’t learned oscillations before. In all our deductions below, $T$ represents the period which is the time taken to complete one full oscillation, $A$ represents the amplitude of the oscillation which is the maximum displacement away from the equilibrium position, $f$ represents the frequency of the oscillations which is the number of oscillations per second, $\omega$ represents the angular frequency or angular speed of the motion. When you first study the concept, your teachers might directly taught you that the displacement of an SHM is exactly the same as the projection of a turning radius to the x-axis or y-axis and taught you to do the deductions in the following to get the equations for SHM with out telling you why. They might persuade you using some visuals like the gif on the right.
Steps for deduction:
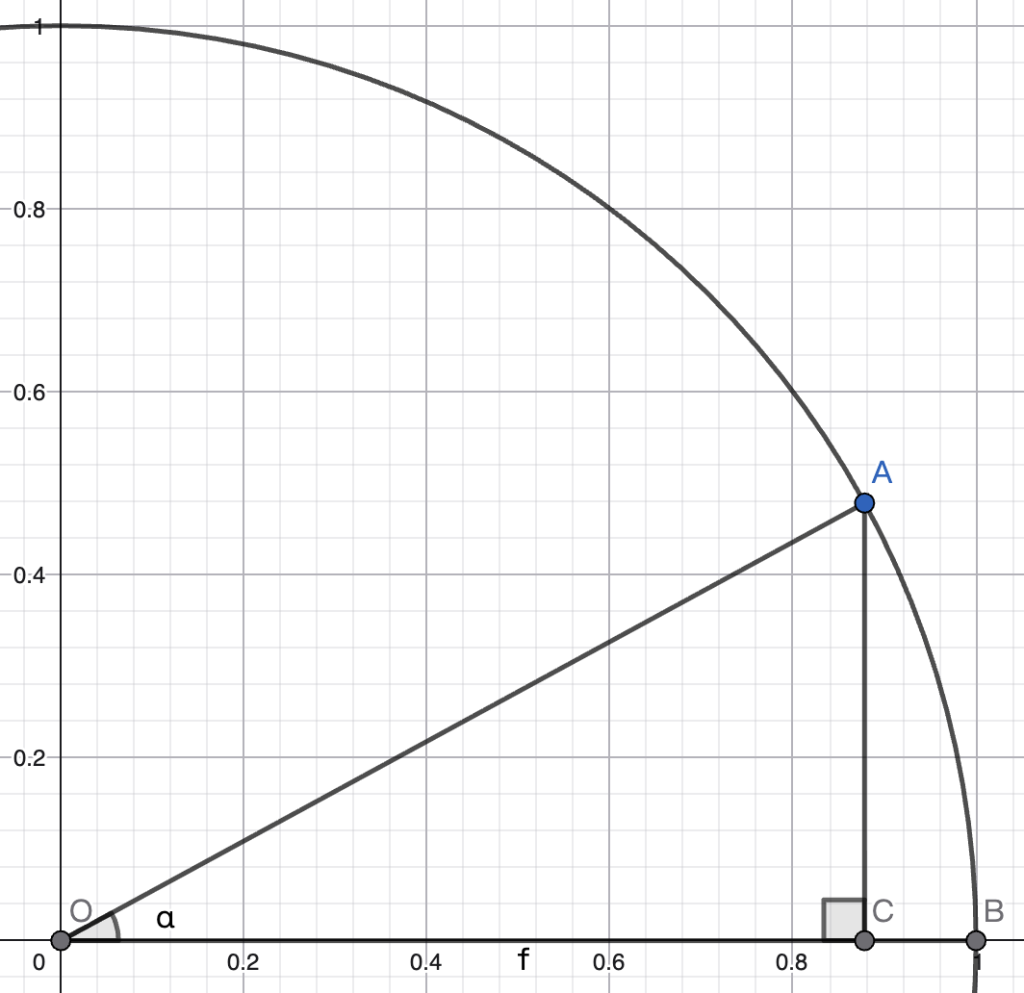
- Draw a circle with radius of $A$. Well in the graph above is the situation of radius 1, but actually the radius of the circle can be any number. Then consider the things in the first quadrant. The radius $AO$ has a angle $\alpha$ with the x-axis which is defined by $\alpha=\omega t$ which means that the radius is moving around the center of the circle at a constant rate of angular speed.
- Since SHM is exactly the same as the projection of a turning radius to the x-axis, we should find the length of $CO$ which is calculated using trigonometry $Displacement\ d=CO=AO\cdot\cos{\alpha}=A\cdot\cos{(\omega t)}$.
- Find the first and second derivative of the displacement to find the function of velocity and acceleration:
$v=d’=-A\omega\cdot\sin{\omega t}$, $a=v’=d”=-A\omega^2\cdot\cos{\omega t}$
It is intuitive, but not enough strict. No one have ever explained why the SHM can be described in circular motion!
I have to admit that when birdy first asked me I just felt that it is too obvious to prove, but I can never explain clearly why was that. I also believe that this assumption is not like some equations in chemistry that are purely based on experiments. There might be some innate connections between oscillations and circles, or $\pi$.
Turning Point of the Explanations
Once later in the semester, our class studied damped oscillations which are SHMs with energy loss. When finding infos from the web of how the equations of damped oscillations are deduced, I was suddenly inspired to try solving a differential equation about the SHM by myself because damped oscillations uses similar method to get the answer. The mechanism under it is more direct and intuitive than I’ve ever thought.
When considering a classical situation of SHM, spring mass system, there are only one horizontal force included, which is the force excerted on the mass by the spring, $F=-kx$ as described in Hook’s law. You might ask about the gravity and supporting force given by the table but they are acting in the verticle direction and cancels out each other all the time. In a classical spring mass, system, we only concern about motions in the horizontal direction. Considering another equations that is so important in kinematics that connects force and mass, we immediately remember the Newton’s second law, $F=ma$. Notice that the Force here represents the net force which completely meets the requirements in a spring mass system because there is only one force in the horizontal direction. So we get a equation that seems to be non-sense
$$
ma=-kx
$$
Consider our goal: we want to gain an expression of displacement against time. Here, x is the displacement, but how is the time comes from? Maybe the differential form of $a$ could reduce an unknown value into $x$ and $t$ which are the variables desired. So the equation can be rewritten in
$$
m\frac{d^2x}{dt^2}=-kx
$$
But it is still unable to be solved. We never learned how to solve a second-order differential equations! That’s time for some extension.
When solving a second-order differential equation, we usually use a Characteristic Equation, which is usually described as $x = e^{rt}$. This is because the perfect characteristics of the exponential functions with $e$: it can be transformed to linear functions by taking the natural log, being exponentials itself, and even tirgnometry functions when we introduce $i$, which is the imaginary unit representing $\sqrt{-1}$. So substituting $x = e^{rt}$ into our equation:
$$
m\cdot r^2e^{rt}=-ke^{rt}
$$
$$
(m r^2+k)e^{rt}=0
$$
Since $e^{rt}$ cannot be zero, $m r^2+k=0$, $r=\displaystyle\pm\sqrt{-\frac{k}{m}}=\pm i\sqrt{\frac{k}{m}}$
The general solution to the differential equation should be the sum of both roots, which is
$$
x(t) = C_1 e^{r_1 t} + C_2 e^{r_2 t}
$$
so,
$$
x(t)=e^{i\sqrt{\frac{k}{m}}t}+e^{-i\sqrt{\frac{k}{m}}t}
$$
According to the Euler’s formula, $e^{ix}=\cos x+i\sin x$; $e^{-ix}=\cos x-i\sin x,$
$$
x(t)=C_1\cos{(\sqrt{\frac{k}{m}}t)}+C_1i\sin{(\sqrt{\frac{k}{m}}t)}+C_2\cos{(\sqrt{\frac{k}{m}}t)}-C_2i\sin{(\sqrt{\frac{k}{m}}t)}\\=(C_1+C_2)\cos{(\sqrt{\frac{k}{m}}t)}+(C_1-C_2)i\sin{(\sqrt{\frac{k}{m}}t)}
$$
As we all know, the displacement of an object must be a real number (maybe it could be imaginary somehow……I don’t know. Just ignore that because it’s way far from what I can understand), so $(C_1+C_2)$ is real and $(C_1-C_2)i$ is also real. Since they are just two constants, why not just replace them with B and C? So,
$$
x(t)=B\cos{(\sqrt{\frac{k}{m}}t)}+C\sin{(\sqrt{\frac{k}{m}}t)}
$$
We are almost done! But this form of the sum of two trigonometry functions seems to be less “beautiful.” We want a formula containing only one sin or cos. Using Auxiliary Angle Formula, or just simply draw a right triangle with right-angled side of B and C and hypotenuse of A, thus $A=\sqrt{B^2+C^2}$. Extract the factor from the formula gives
$$
x(t)=A(\frac{B}{A}\cos{(\sqrt{\frac{k}{m}}t)}+\frac{C}{A}\sin{(\sqrt{\frac{k}{m}}t)})
$$
Using the triangle, we denote $\cos\phi=\frac{B}{A}$, $\sin\phi=\frac{C}{A}$, so
$$
x(t)=A(\cos\phi\cos{(\sqrt{\frac{k}{m}}t)}+\sin\phi\sin{(\sqrt{\frac{k}{m}}t)})
$$
Using the angular formula of cos,
$$
x(t)=A\cos{(\sqrt{\frac{k}{m}}t+\phi)}
$$
That’s it! So the nature of oscillation and why it is related to circle lies under its mathematical properties. The introduction of $e$ and $i$ contributes to the formation of trigonometry functions, and that’s just eureka!
You might wonder now why the coefficient before t isn’t $\omega$? You might hered about the period formula of $T=2\pi\sqrt{\frac{m}{k}}=\frac{2\pi}{\omega}$, We are told to substitute $\sqrt{\frac{k}{m}}$ as $\omega$ all the time, but no one really told us why to do so. But with the differential equation solved, we proved that $\omega=\sqrt{\frac{k}{m}}$ consequently because the coefficient before t in a cos function just physically means the angular frequency. How fantastic it is!
Now, when I finally figure out the answer of Birdy’s question, I just understand how ignorant I was when I thought the circular motion in SHM to be so obvious. Delving in to the deeper answers should never stop.
Leave a Reply
You must be logged in to post a comment.